前回、前機種のZenmuseL1との比較をご紹介しましたが、今回は、L2によるレーザー測量の点群取得の可能性について検証を行いました。ぜひご覧ください。

飛行概要
今回は弊社スタッフの所有する土地にて Zenmuse L2 での検証を行いました。検証条件は以下のとおりです。
- 使用機体:Matrice 300 RTK + Zenmuse L2
- 高度:100m
- 飛行速度:15m/s
- D-RTK2は設置せず、国土地理院の電子基準点データを使って、PPK処理
- 天候:晴れ、弱風、気温15℃前後
- DJI Terra の構築設定
- 点群精度最適化ON/点群平滑化OFF
- グラウンドポイントタイプ:緩斜面デフォルト
飛行場所
飛行場所:滋賀県長浜市石田町

現場状況としては、グラウンドデータの取得状況が分かるように、森林を含めた飛行ができるような場所を選定しました。
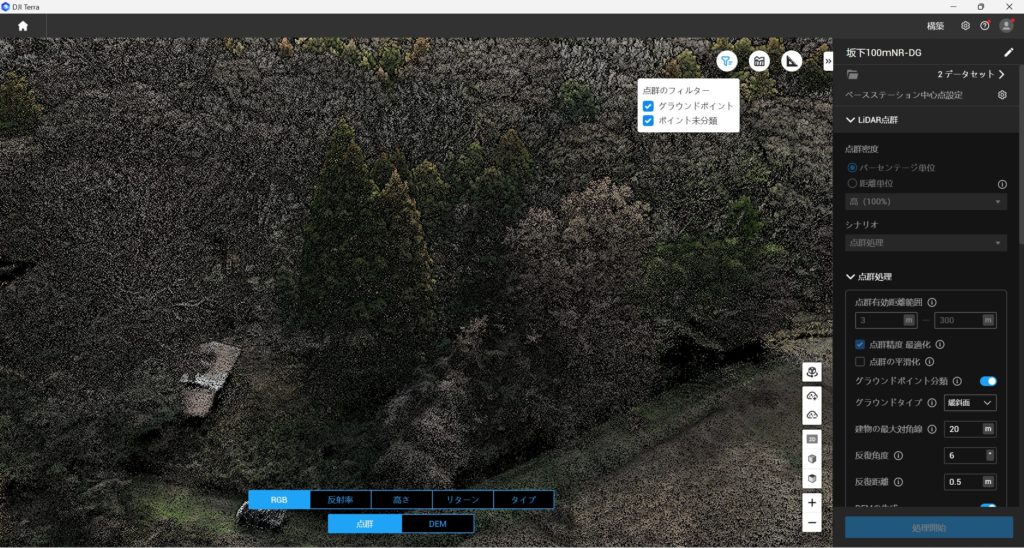
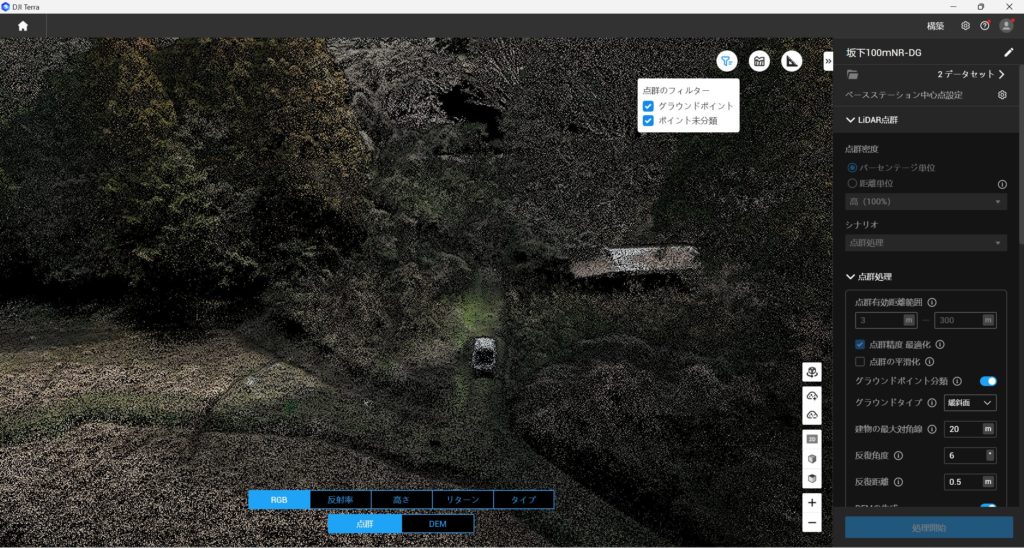
取得した点群データ
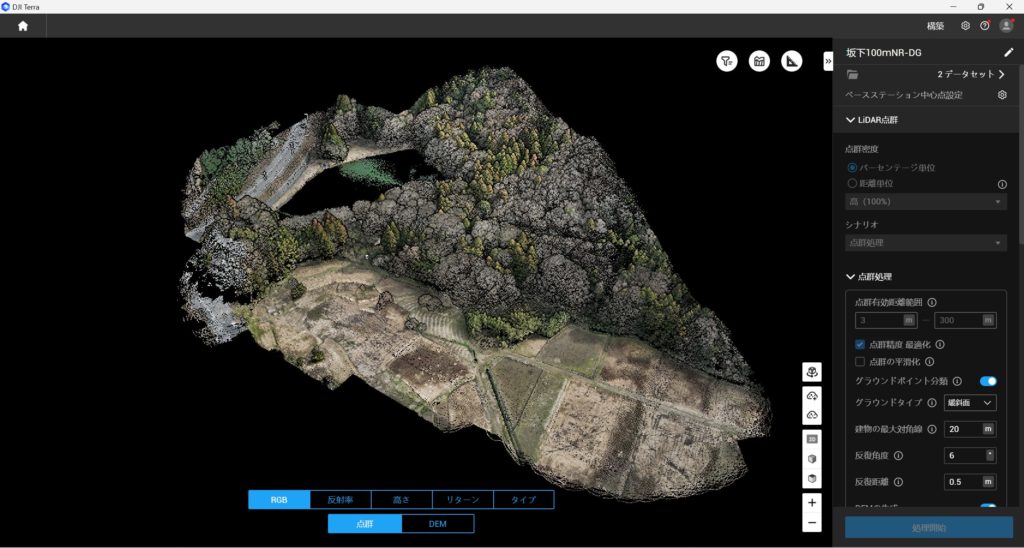
こちらが、点群データの全体像となります。(フィルタリング前)
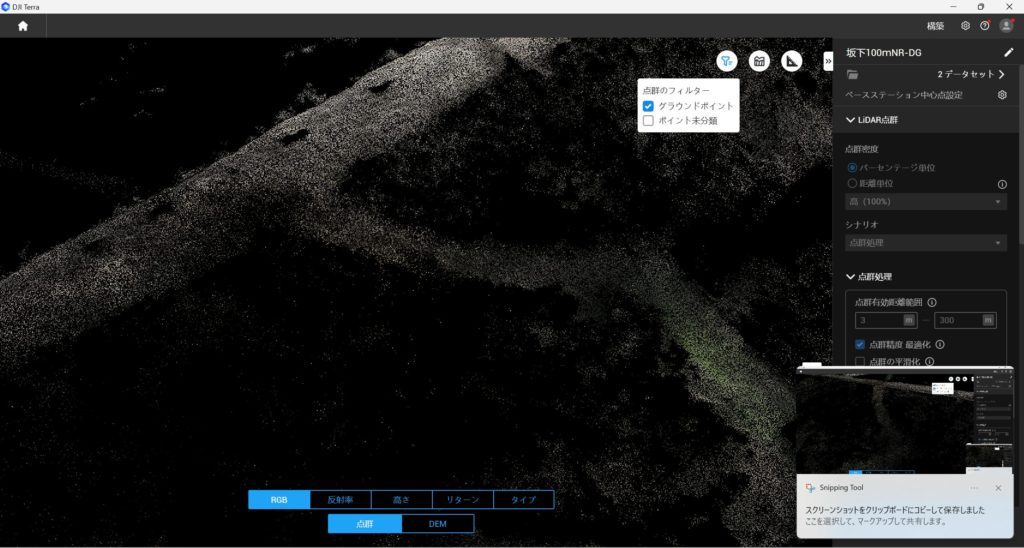
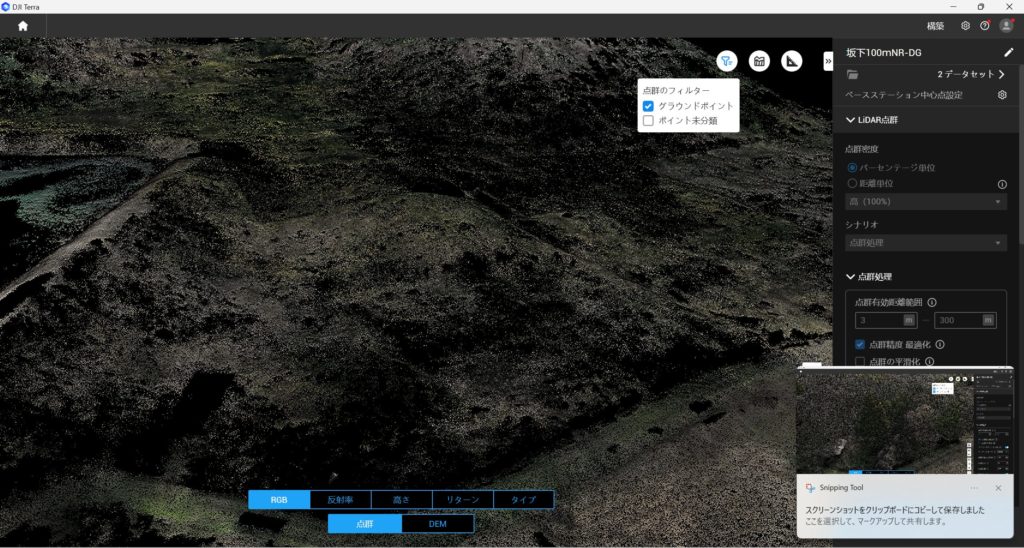
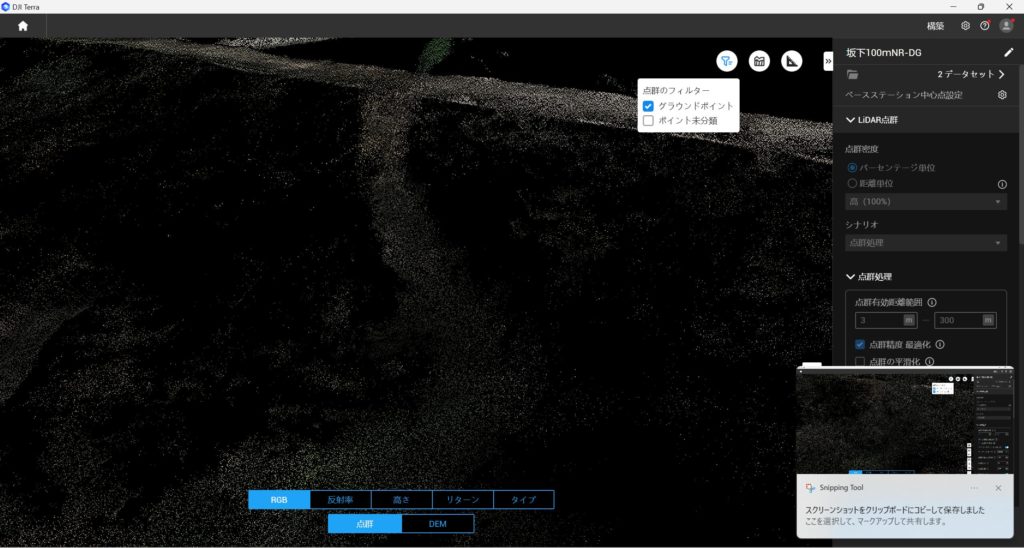
こちらが、フィルタリングをかけて、木々を削除したデータになります。
木の下のグラウンドデータをしっかりと取得できている様子が分かります。
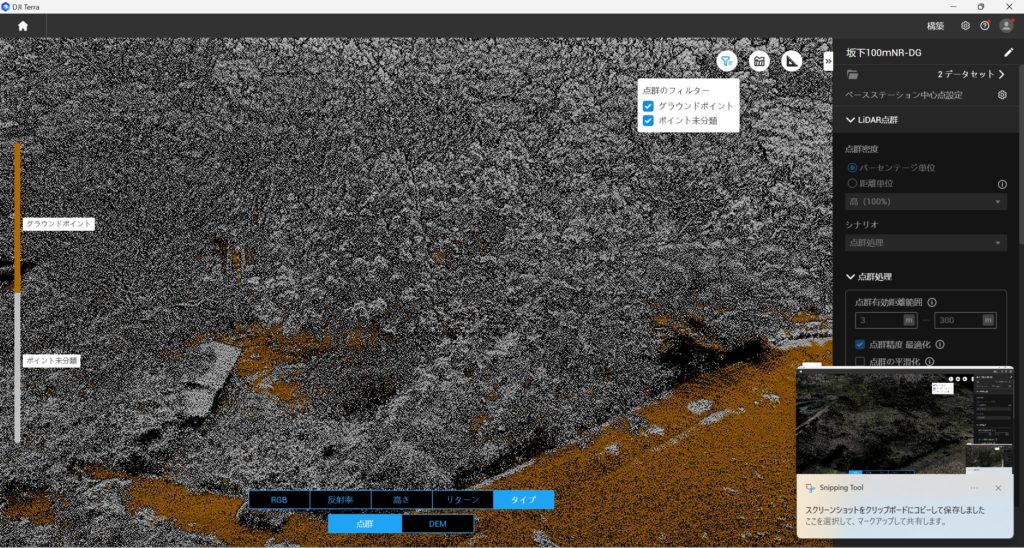
今回の検証のポイント

本現場には、上記の赤線で示したところに田んぼからため池に繋がる坂道の通路が存在しますが、上記の画像を見てもその通路の形状はわかりません。
仮に写真測量でこの現場を測量したとしても、グランドデータの取得はできないため、上記の画像と同じ結果になります。
今回、L2によるグラウンドデータの取得を行いましたが、この通路がはっきりと形として現れました。
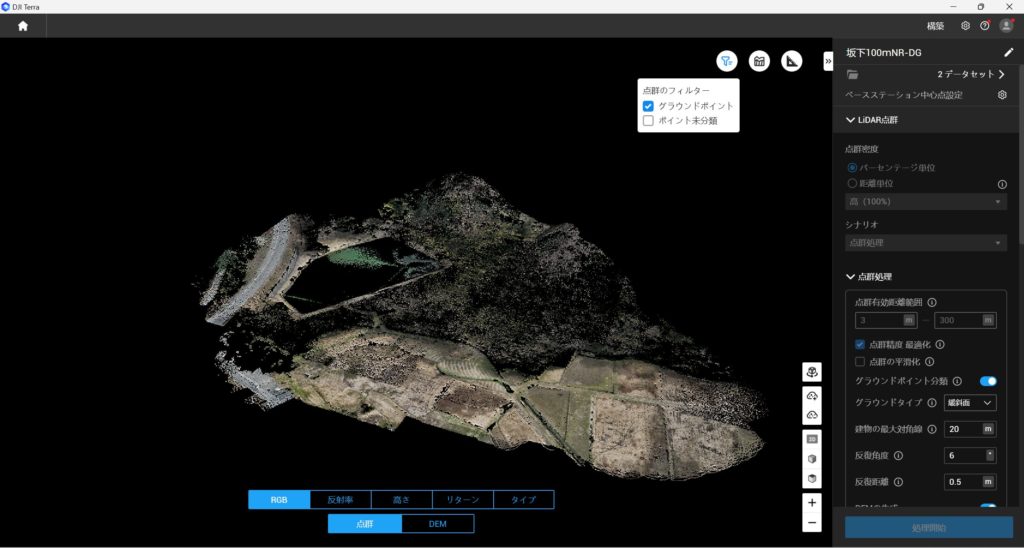
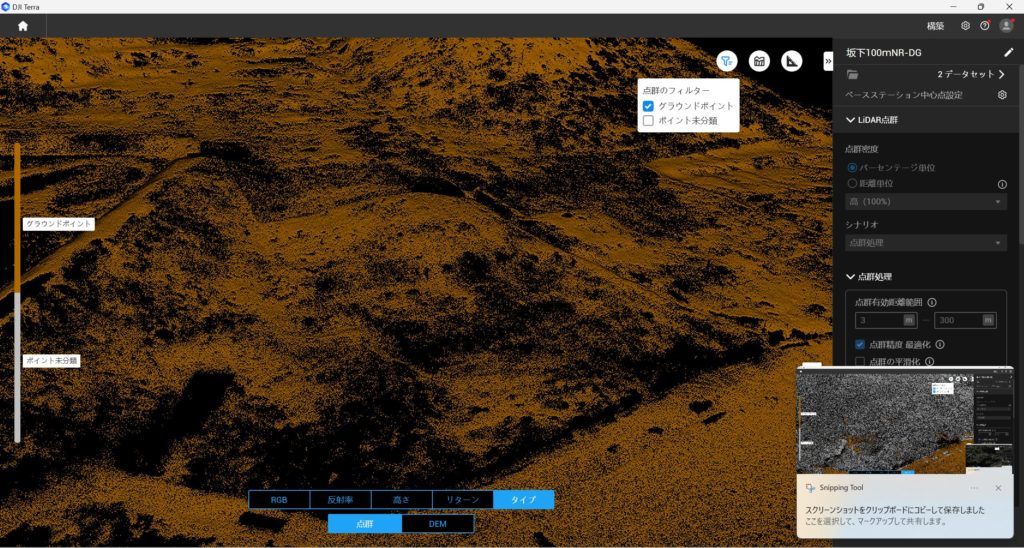
上記の点群データにフィルタリングをかけたのが以下のデータとなります。
角度を変えてみると、以下のようになり、はっきりと通路が表現されています。