DJI Enterpriseアプリを使って、D-RTK3の固定局キャリブレーションができるようになりましたので、その方法をご紹介します。
Matrice4シリーズやMatrice400では、D-RTK3と機体と送信機を接続した状態で、Pilot2アプリ内で固定局キャリブレーション(手動入力、N-RTK、PPP)を行うことができます。詳細は以下のボタンからご確認いただけます。
D-RTK3はMatrice350やMavic3Eなどの旧モデルでも使用できますが、上記のPilot2アプリを使っての固定局キャリブレーションは「手動入力」のみ対応する形でした。
今回の記事は以下の作業を行っておられる方には、非常に効率化が図れる内容になっておりますので、ぜひご一読ください。
<以下の方に特におすすめの記事です>
- 使用機体:Matrice300、Matrice350、Mavic3Enterpriseシリーズ、Matrice30シリーズ
- 使用機材:D-RTK3
- D-RTK3の固定局を設置する際の流れ
- D-RTK3のローバーステーションモード(N-RTK)で設置場所の座標値を取得
- 取得した座標の標高にアンテナ高を加算
- D-RTK3を固定局モードにし、機体を接続した状態でPilot2アプリの固定局キャリブレーションを手入力
↓以下の様に効率化できます
- D-RTK3の固定局を設置する際の流れ
- D-RTK3を設置し、固定局モードに設定
- DJI EnterpriseアプリでN-RTKを使って自動キャリブレーション
上記のようなイメージです。これまで、わざわざローバーステーションモードで設置場所の座標値を調べ、アンテナ高を加算して、手入力していた作業が、すべて自動でできるようになります。
DJI EnterpriseアプリでD-RTK3の固定局キャリブレーション(ネットワークRTKを使用)
DJI Enterpriseアプリをまだインストールされていない方は、以下を参照してインストールをお願いします。

まずは、事前準備として、D-RTK3の「M」マークが「緑色」になっていることを確認してください。黄色や青色になっている場合、電源ボタンを「3回」押下することで、モード切り替えができます。
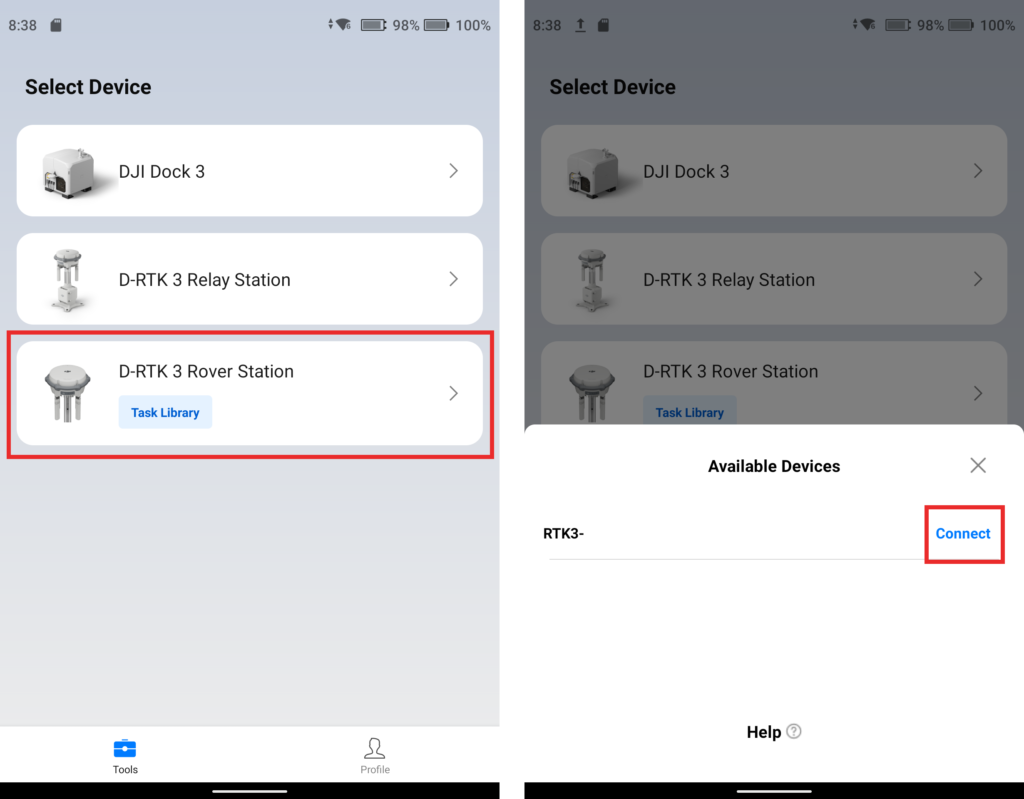
DJI Enterpriseアプリを起動し、「D-RTK 3 Rover Station」をタップし、Connectをタップします。
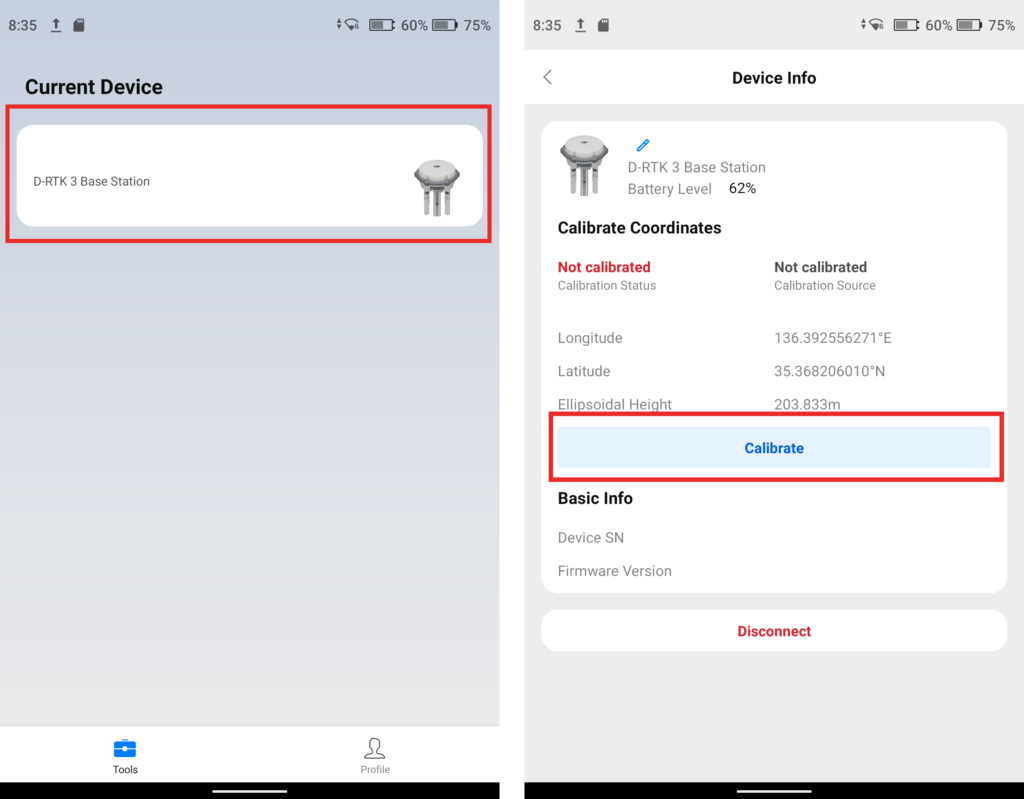
D-RTK 3 BaseStationをタップすると、画面が切り替わり、「Not calibrated」の表記が出ていますので、「Calibrate」をタップします。
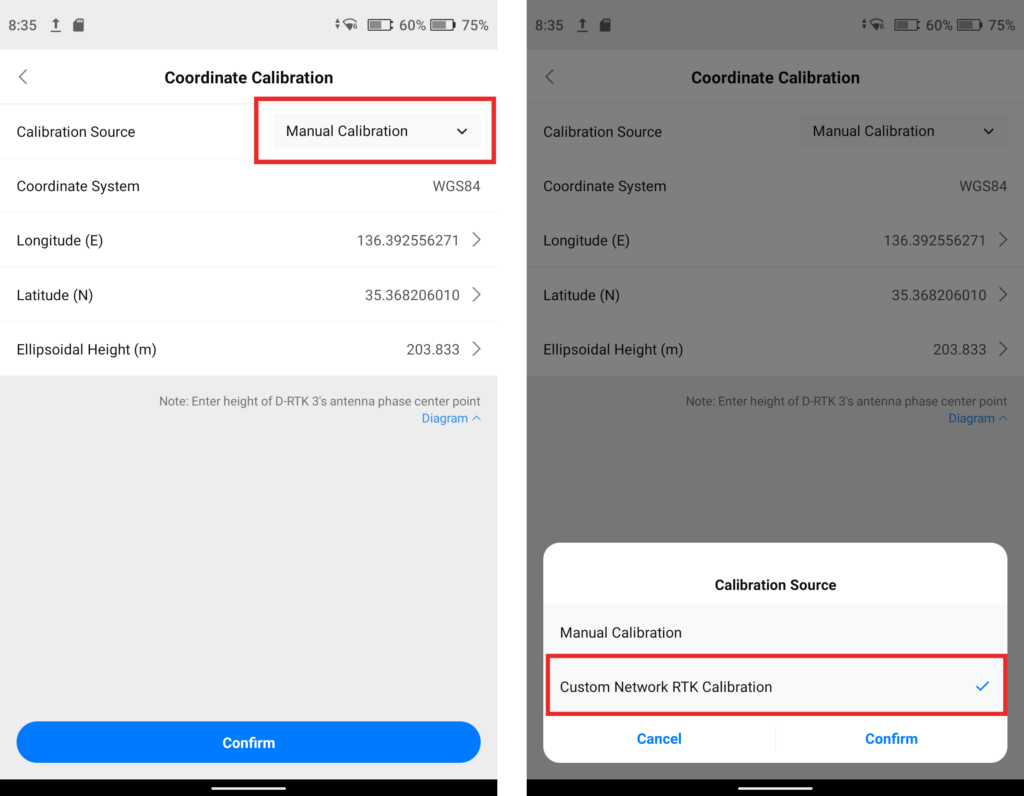
Calibration SourceがManual Calibrationとなっていますので、タップして「Custom Network RTK Calibration」を選択し、Confirmをタップします。
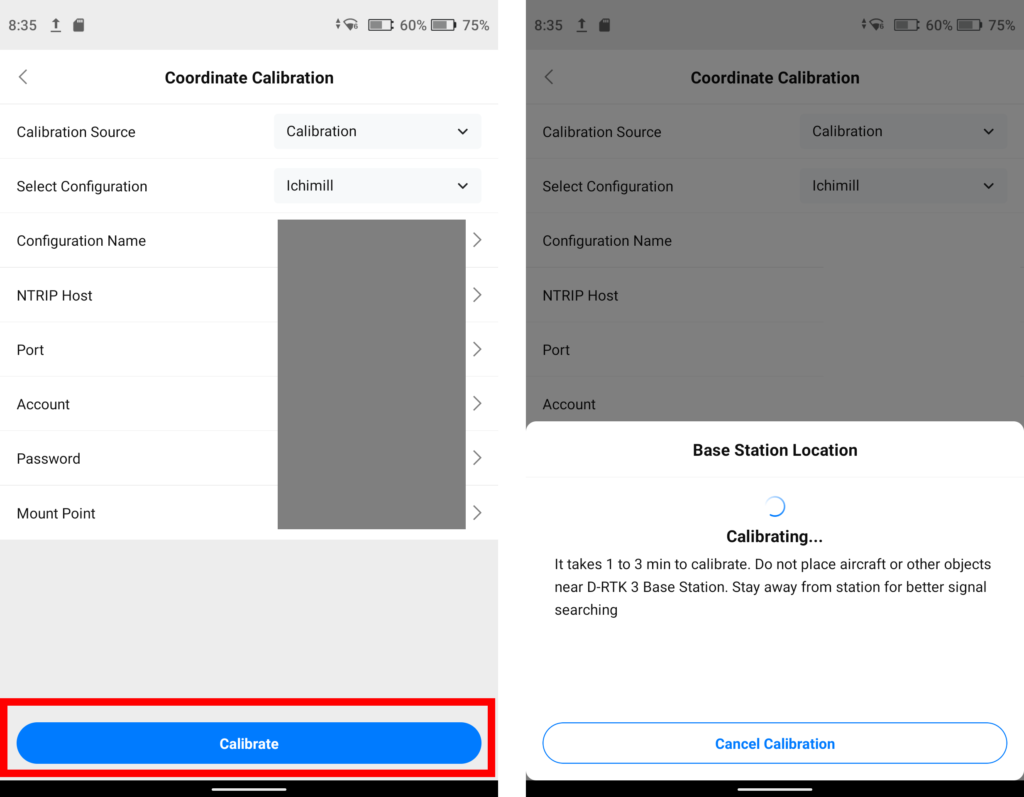
カスタムネットワークRTKの設定情報を入力し、Calibrateをタップすると、キャリブレーションを開始します。
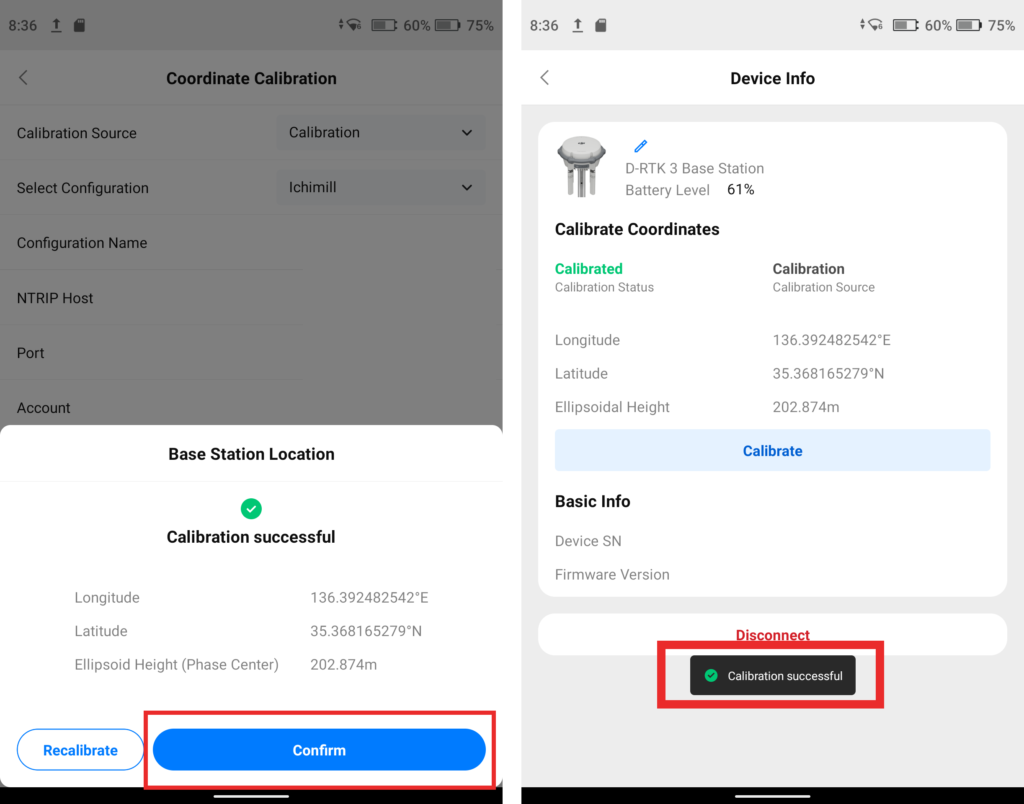
Calibration successfulと表示されましたら、Confirmをタップします。Calibratedと表示されていれば成功です。
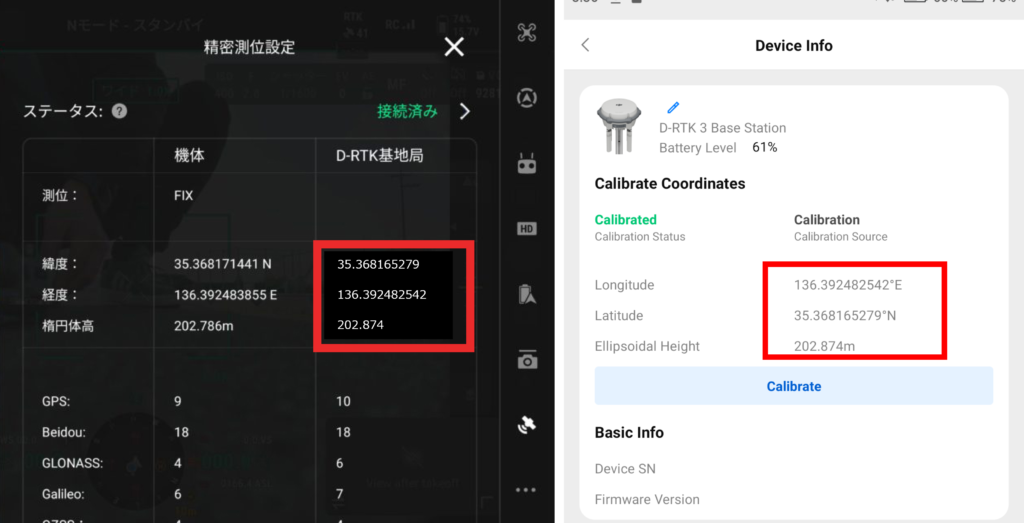
次に、機体の電源を入れ、D-RTK3に接続を行い、赤枠部分の数値と、DJI Enterpriseアプリで取得された座標の数値が一致していれば問題ございません。