業務内容
本業務は、山間部の等高線データ取得のために、グラウンドデータ作成を目的とした測量業務として実施いたしました。
測量手法にはUAVレーザー測量を採用し、以下の4箇所の範囲を計測しております。
計測範囲1(約1.9ha)

計測範囲2(約1.9ha)

計測範囲3(約4.3ha)

計測範囲4(約0.8ha)

対空標識は各計測エリアにそれぞれ4つ設置し、調整および検証を行いました。

最終成果物は、オルソ画像、グラウンドデータおよび精度管理表(RMS誤差、標準偏差、コース間点検、密度確認)となります。
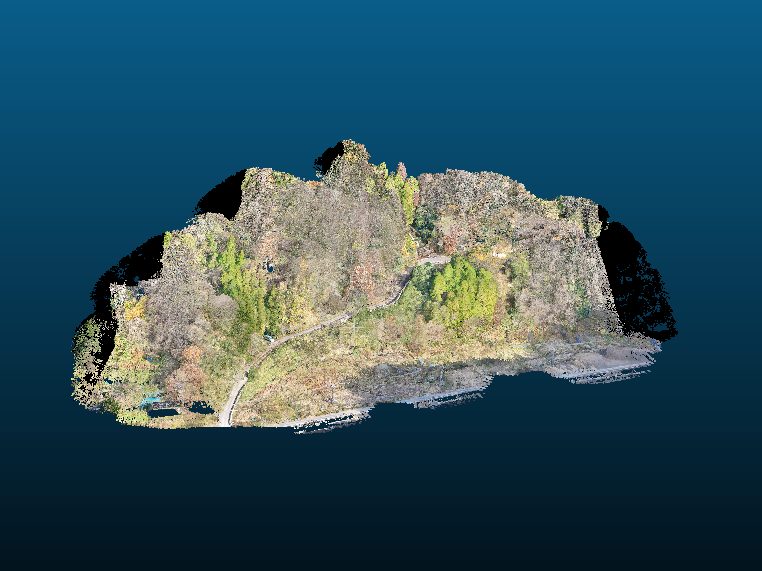
オリジナル

グラウンド

オルソ
精度検証結果(検証点2点)
位置精度(計測範囲1)
| 点 | ΔX | ΔY | ΔZ |
| DT39 | -0.010 | -0.006 | 0.009 |
| DT40 | -0.011 | -0.033 | 0.011 |
| 平均値 | -0.011 | -0.020 | 0.010 |
| RMS誤差 | 0.011 | 0.024 | 0.010 |
位置精度(計測範囲2)
| 点 | ΔX | ΔY | ΔZ |
| DT27 | -0.010 | -0.014 | -0.007 |
| DT28 | 0.020 | 0.012 | 0.004 |
| 平均値 | 0.005 | -0.001 | -0.002 |
| RMS誤差 | 0.016 | 0.013 | 0.006 |
位置精度(計測範囲3)
| 点 | ΔX | ΔY | ΔZ |
| DT15 | 0.017 | 0.023 | 0.010 |
| DT19 | -0.002 | -0.008 | -0.023 |
| 平均値 | 0.008 | 0.008 | -0.007 |
| RMS誤差 | 0.012 | 0.017 | 0.018 |
位置精度(計測範囲4)
| 点 | ΔX | ΔY | ΔZ |
| DT6 | 0.034 | 0.044 | -0.003 |
| DT7 | 0.009 | -0.019 | -0.001 |
| 平均値 | 0.022 | 0.013 | -0.002 |
| RMS誤差 | 0.025 | 0.034 | 0.002 |
場所
石川県輪島市
使用した機材
ドローン Matrice400
モジュール ZenmuseL3
位置情報モジュール D-RTK3
レーザー用対空標識
使用したソフトウェア・サービス
DJI Terra
トレンドポイント(福井コンピューター)
日付
2025年12月初旬
時間
対空標識設置 3時間
飛行時間 30分
グラウンドデータ作成 20時間
スタッフ数
パイロット 1名
飛行補助 2名
データ処理 1名